座標変換(回転)の計算方法¶
CAEで空間上の変位を計算することがあります。その計算自体はCAEのソフトウェアがしてくれるのですが、計算結果の表示がグローバル座標系しか表示してくれません。でも、知りたいのはローカル座標系での表示なのです。ということで、座標系の変換について調べてみました。
目次
座標系を回転する¶
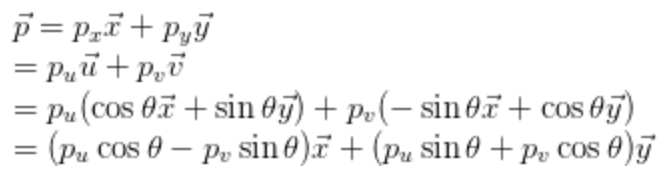
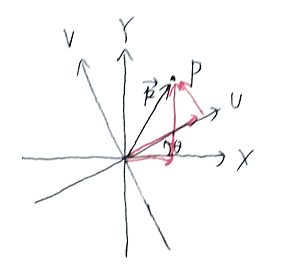
変位を示すベクトル自体は移動しないので、座標変換といっても回転だけです。
基本ベクトルの関係を導き出してみます。
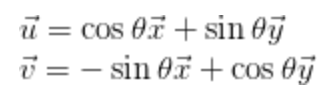
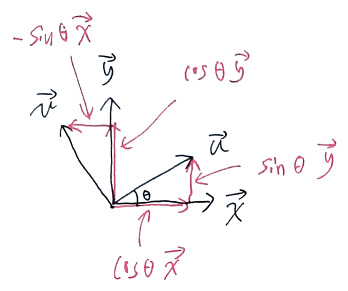
XY座標系の基本ベクトルをx, yとします。
UV座標系の基本ベクトルをu, vとします。
XY座標系とUV座標系の原点は同一とします。
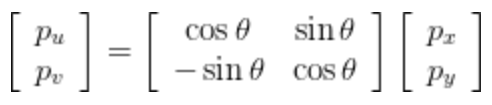
xからuへ回転する角度をθとします。 このときu, vはx, yを用いて、下記の様に表せます。
3次元空間での変換行列¶
3次元空間でXYZ座標をUVW座標のZ軸とW軸が同一とします。
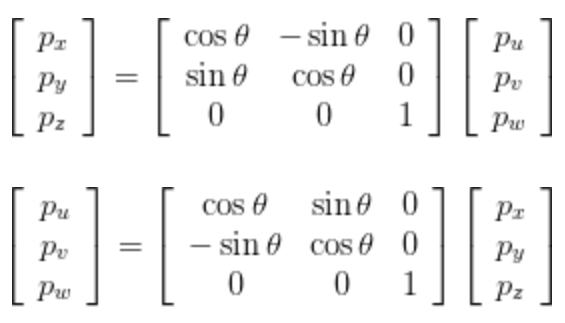
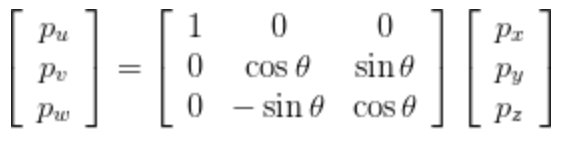
上記はZ軸周りの回転です。同様にX軸周りの回転は下記の様になります。
Y軸周りの回転は下記の様になります。
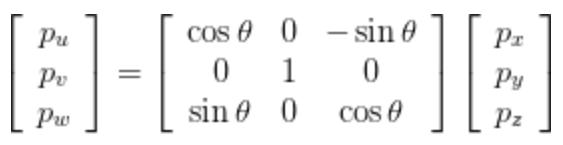
あとは、グローバル座標系(XYZ座標系)をX軸Y軸Z軸回りにそれぞれどれくらいの角度だけ回転するとローカル座標系(UVW座標系)になるか調べて、順番に計算していけば良いわけです。
公開日